Cybernetic Control Laboratory (CyCLab)
Department of Mechanical & Aerospace Engineering
University of California
38-137M Engineering IV420 Westwood Plaza.
Los Angeles, CA 90095
Tel: (310)206-2533
Fax: (310)206-2302
E-mail: tiwasaki@ucla.edu

Cybernetic Control Laboratory (CyCLab)
|
|
--------------------------------------------------------------------------------
Optimal Gaits for Locomotion Systems
NSF Graduate Research Fellowship, July 2012 - June 2016, Recepient: Saba Kohannim
This project has developed a theory for computing an optimal gait that minimizes a quadratic cost function while propelling forward at prescribed linear and angular velocities.

NRI: Biologically Inspired Feedback Control of Robots Interacting with Humans to Cooperate and Assist with Repetitive Movement Tasks
NSF 1427313, September 2014 - August 2017, PI: T. Iwasaki
The project will address the fundamental problem of how to control the motion of a robot so that it can cooperatively work with humans to assist them in repetitive tasks. Oscillatory body movements constitute an elementary means for various tasks in human living. Such repetitive movements include essential life functions such as heart beat, breathing, eating (chewing), walking; basic daily tasks such as brushing teeth, washing face; house-hold chores such as cleaning windows, sweeping floor; health/entertainment activities such as dancing, swimming, cycling, rowing; and manufacturing labors such as moving objects in factory assembly lines. Robots and mechanical devices that assist such human movements would be found useful in a number of contexts. A robotic manipulator and a human arm may grab a common tool to work together on repetitive tasks where the former assists the latter by providing force and stability to reduce burden on the human. An exoskeleton may be worn to complement reduced capability of, or provide rehabilitations for, elderly people and patients with neurological disorders or physical disabilities. Thus, well-designed assistive devices for oscillatory movements would significantly contribute to improving quality of human life. Design of robotic mechanisms for such assistive devices is surely a challenging task. Equally challenging is the design of control algorithms that command the actuators and govern the motion of the robotic device. The state-of-the-art control technologies allow a designer to program a robot to achieve prescribed motion with speed, precision, and robustness, as seen for instance in industrial manipulators. However, if such robots interact with humans, they would be perceived as stiff, stubborn, or even dangerous, and are therefore not suitable as co-robots in direct support of humans. What is needed is control algorithms that make robots understand human intentions, cooperate with humans without insisting on their preprogramed operations, and assist with human tasks. Development of such algorithms will be the focus of this project.
This basic research aims to establish a systematic method for designing a feedback controller for a general robotic system interacting with a human to stabilize the oscillation intended by the human and to reduce the burden on the human by providing assistive forces. The control architecture is inspired by the central pattern generator (CPG) -- neuronal circuits that command muscle contractions to achieve rhythmic body movements during animal locomotion. CPGs are attractive for engineering applications due to its ability to conform their oscillations to natural dynamics of a varying environment through sensory feedback. This exploratory research will investigate the potential of the CPG architecture to provide a viable foundation for a new system design for achieving co-robots that assist humans to execute oscillation tasks. The controller is realized as an interconnection of identical units, emulating neuronal dynamics. The problem is formulated as the search for the interconnection such that the robot-human-CPG system has a stable limit cycle in which human decides an appropriate oscillation and CPG-controlled robot assists. The method of multivariable harmonic balance will be employed to obtain a convex characterization of feasible interconnection matrices that meet oscillation specifications. The approximate nature of the design method will be complemented by extensive simulations as well as physical experiments on robotic manipulators. While the central theme of control theory has been the regulation around an equilibrium point of a dynamical system, capability of generating coordinated autonomous oscillations can be extremely useful in many engineering applications. The basic research proposed here will provide an initial stepping stone toward a new paradigm for cooperative pattern generations by feedback control.
Biological Mechanisms for Exploiting Resonance in Undulatory Swimming
NSF 1335545, August 2013 - July 2016, PI: T. Iwasaki
The goal of the proposed project is to understand whether and how neuronal control circuits exploit mechanical resonance during animal locomotion to achieve highly efficient rhythmic body movements. General principles will be uncovered through a specific case study of dynamical mechanisms underlying undulatory swimming of leeches. Diverse behaviors of leeches are generated by relatively simple neuronal circuits, providing a unique opportunity for preliminary understanding of how the brain works in the most primitive form. A simple integrated model of leech swimming, amenable to analytical studies, will be developed from detailed, experimentally validated, component models of the neuronal circuit, motoneuron activation, muscle biomechanics, and body-fluid interactions. Theoretical and computational studies of the model will then be performed to examine how the neural control circuits process sensory signals and achieve oscillations near a resonance under nominal and perturbed environmental conditions.
Once uncovered, resonance entrainment principles will contribute to understanding of general complex systems that achieve robustness, adaptability, and emergence. These new functionalities, when engineered, will have a broad range of applications, including robotic vehicles that maintain efficiency of transportation under varying environments. In the medical field, understanding of the neural control mechanisms is fundamental to determining the cause, rehabilitation, and cure for loss or reduction of locomotor ability due to neurological disorders or spinal cord injury. The research activities are integrated into educational activities at both K-12 and college levels. A graduate student will be trained for experimental data processing and model-based dynamical systems analyses. Through research experience activities, undergraduate students will develop educational software modules for simulation/animation of leech swimming to stimulate K-12 students' curiosity for science/engineering during such occasions as Engineering Open House. The results will be broadly disseminated to both biology and control engineering communities to enhance cross-cultural fertilization.
Central Pattern Generator (CPG) Control of Locomotion for Adaptive Gait Generation
NSF 1068997, July 2011 - June 2015, PI: T. Iwasaki
This basic research aims to establish a general theory for designing feedback control mechanisms to drive robotic systems that swim like fishes or crawl like snakes. The design method will enable propulsion with agility and energy efficiency. The control algorithm is inspired by the central pattern generator (CPG) --- neuronal circuits that command muscle contractions to achieve rhythmic body movements during animal locomotion. The CPG is an interconnection of multiple neurons with simple individual dynamics, exhibiting a collective behavior perceived as a pattern. What makes CPGs an attractive object for engineering applications is its ability to adaptively choose the pattern of body oscillation appropriate for varying environments. This exploratory research will investigate the potential of the CPG architecture to provide a viable foundation for a new system design methodology to achieve coordinated oscillations of mechanical systems by feedback control.
Understanding of the mechanisms underlying emergent behaviors of CPGs could provide a central idea for innovative design of engineered systems with new functionalities. A theory that relates local interactions to the resulting global pattern would help identify, predict, or avoid, for instance, traffic congestion and instability in power grids. Synergistic effects between neuroscience and control engineering will be exploited in both research and education. The educational goal of this project is to provide students with a broad dynamical systems view point that applies not only to the design of engineered machines but also to understanding of biological phenomena. The goal will be approached through multidisciplinary training of graduate and undergraduate students in a teamwork environment, and by incorporating research findings into control engineering courses. The results will be broadly disseminated to both neuroscience and control communities through conference presentations, journal publications, invited seminars, and tutorial workshops, to enhance cross-cultural fertilizations.
MURI: Towards a Mission-Configurable Stealth Underwater Batoid
ONR N00014-08-1-0642, May 2008 - October 2013, PI: H. Bart-Smith, Co-PIs: Haj-Hariri, Humphrey, Iwasaki, Smits, Fish
The objective of this basic research is to uncover the fundamental control mechanism for generating natural body movements in manta ray swimming, and to establish a theory for designing CPG-based feedback controllers that achieve optimally efficient, stealthy, flapping-wing propulsion of underwater vehicles. To achieve the objective, the work is broken down into the following tasks:
I. Develop a mathematical model of the body tensegrity structure in the fluid environment and analyze the model to find natural modes of oscillations that lead to efficient swimming.
The equations of motion for the body tensegrity structure will be developed from the first principle in physics, capturing the inertia of rigid elements and flexibility of pretensioned wires. For the purpose of control design, the complex dynamics generating the fluid forces will be simplified in terms of several components including the viscous damping, inertial drag, and added mass effect. The resulting model of the vehicle is a set of two vector-valued differential equations, one of which describes the body dynamics from the applied tensions to the body shape, and the other the rectifying mechanics from the body shape change to the locomotion velocity. We will analyze the model by considering the motion around a nominal posture and retaining up to the bilinear terms in the perturbed variables. The resulting model for the body dynamics will be linear in the body configuration variables with coefficients dependent on slowly varying locomotion velocity v. The standard modal analysis will reveal the natural motion of the body-fluid system at a given locomotion velocity. The natural motion is characterized by the frequency, phases, and amplitudes of the body variables. These parameters will be compared with the experimental data from video recording of manta ray swimming to examine whether resonance is indeed exploited for efficient swimming.
We also plan to calculate the optimal rhythmic movement of the underwater vehicle. A bilinear term of the body variables and their derivatives will capture the essential dynamics of rectification. In particular, the integral of the bilinear term over one cycle of oscillation gives the net momentum generated by the periodic body motion. We will use this model for the rectifying mechanics to find the most efficient rhythmic movements among those achieving a desired locomotion velocity. We will consider several efficiency measures including the energy loss, peak torque, shape change rate, and slippage. Such optimal motions can be found by a numerical method, or by analytical methods with sinusoidal approximations. The optimal motions will be compared with the natural motion and experimental data to determine the most appropriate gait for stealthy swimming.
II. Design a CPG-based feedback controller that achieves entrainment to the optimally efficient motion utilizing the resonance between the body structure and fluid dynamics.
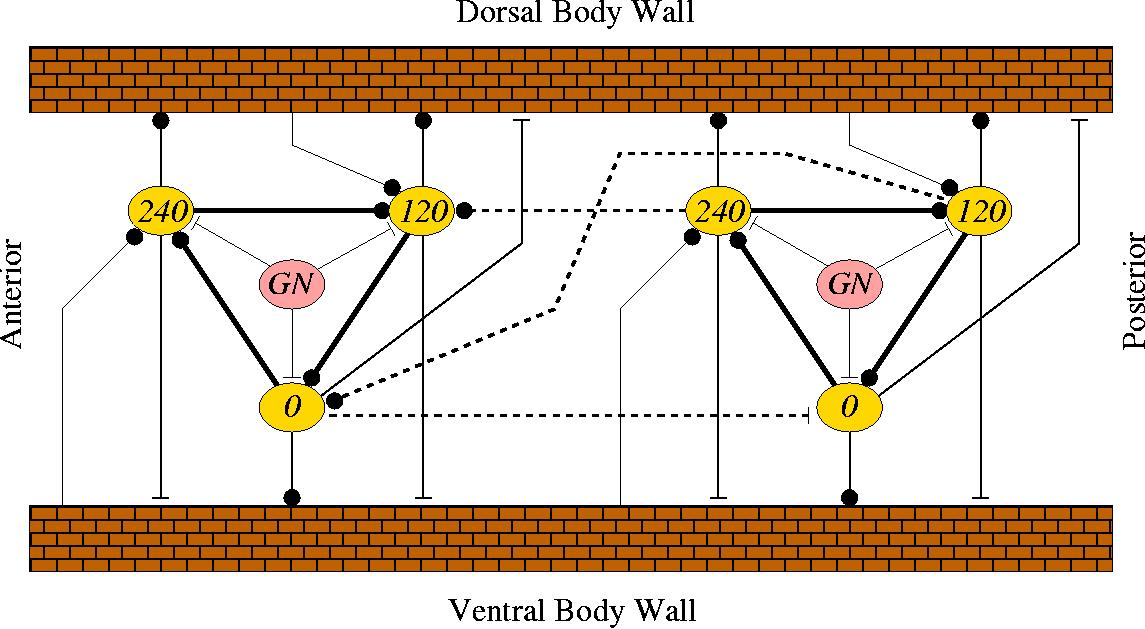
We adopt a simple model of a neuronal membrane relating the presynaptic potential to the postsynaptic potential. The reciprocal inhibition oscillator (RIO) is the simplest and perhaps the most fundamental CPG, consisting of two neurons with mutually inhibitory synaptic connections. The two neurons oscillate 180o out of phase, which is fundamental to drive a pair of muscles (flexor/extensor, dorsal/ventral, etc.) to generate rhythmic body movements in animal locomotion. We plan to use the RIO as the basic unit for controlling the underwater vehicle. An RIO will be placed for each edge of the tensegrity wing structure to command the tension based on the sensory feedback of length information. The intrinsic frequency of RIOs should be chosen away from the resonance frequency, in which case entrainment to the resonance is expected to occur. We will verify this rather counter-intuitive theoretical prediction by simulations and experiments. The resulting oscillation of the wing structure should be close to one of the natural modes calculated in Task I.
In manta ray swimming, flapping motion of the wings has particular phase characteristics, where waves travel over each wing. The natural wing motion achieved in the previous step will have no wave propagation property that is essential for propulsion. To implement the optimal phase relations for flapping found in Task I, the RIOs will be coupled to each other. The topology and strength of the couplings will be determined by the method of multivariable harmonic balance. The couplings should be weak so that the designed phase coordination is not strictly enforced and the flapping pattern adapts to the fluid environment. The design will then be robust against modeling errors inevitable for complex fluid dynamics.
|
 |
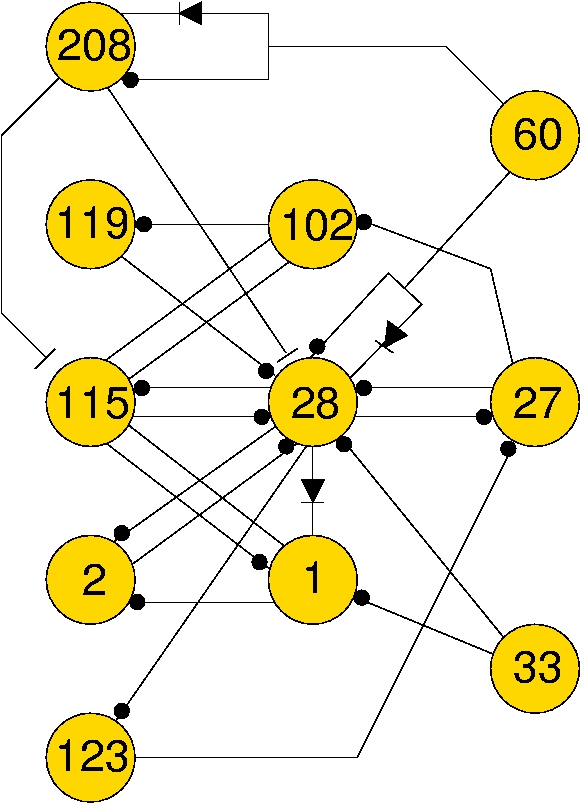
The optimal gait that minimizes the derivative of muscle tension has been calculated. The phase contour (right) shows traveling waves starting at the leading edge and propagating toward the tail as indicated by the arrow. The direction of the optimal traveling wave appears to be aligned with the skeletal structure of the wing (middle). |
Coordinated natural rhythmic movements by distributed biological oscillators
NSF/CMMI 0654070, June 2007 EMay 2010, PI: T. Iwasaki
The overall goal of this project is to understand the biological control mechanism underlying natural rhythmic movements observed in animal locomotion, and to establish a design principle for engineering applications. In particular, we focus on the decentralized control mechanism realized by neuronal oscillators called the central pattern generators (CPGs). Our specific aims are:
1. Establish a design theory for feedback controllers consisting of distributed CPG models to achieve natural rhythmic movements of mechanical systems.
a. Characterize the design parameters (feedback gains and the intrinsic frequency of the CPGs) that yield a desired natural mechanical mode of oscillation.
b. Derive a condition on the design parameters for existence and stability of the oscillations achieved by the CPGs characterized in the previous step.
2. Confirm robustness of the natural movements, achieved by the distributed CPGs, with respect to variations in the mechanical and design parameters.
a. Verify the hypothesis: Every stable oscillation achieved by the distributed CPGs is near one of the natural mechanical modes or the intrinsic frequency of the CPGs.
b. Uncover the partition of the design parameter space so that each region corresponds to one of the natural and intrinsic modes of oscillation.
3. Assess validity and limitations of the control design and robustness analysis through numerical simulations and physical experiments of typical mechanical systems.
a. Examine adverse effects of approximations introduced in the design and analysis through numerical simulations of linear and nonlinear mechanical systems.
b. Conduct experiments on multilink systems to verify feasibility in the face of hardware constraints and unmodeled dynamics.
 |
The Huygens’s pendulum clocks tend to synchronize when placed side by side on a common supporting structure. This results from damping out the 2nd mode of natural oscillation through the friction. A distributed pair of controllers, with a CPG architecture, can be designed to drive two pendulums to damp out unwanted modes of oscillation, resulting in a desired mode of natural oscillation. Thus, a stable limit cycle can be attained so that the two pendulums are synchronized through either in-phase or out-of-phase oscillations.
|
Dynamic Interaction between Biological Oscillator and Mechanical Rectifier
NSF/CMS 0201386, July 2002 - June 2005, PI: T. Iwasaki
Biologists have found evidence that rhythmic animal locomotion such as walking, swimming, and flying, are realized by certain neuronal elements the central pattern generators (CPGs). The CPG drives the animal body which in turn acts as a mechanical rectifier, when interacting with the environment, to convert the rhythmic body motion into its forward velocity. Substantial knowledge on such biological control systems has been generated in the field of neuroscience, yet it awaits full exploitation for engineering design.
The objective of this basic research is to uncover the fundamental mechanism of bi-ological oscillation and its dynamic interaction with the mechanical rectifier. In particular, the project will develop an understanding of the mechanism of animal locomotion from biological ob-servations at the neuronal level, hypothesize the knowledge as engineering principles for feedback control design, and establish a systematic procedure for designing CPG-based controllers to achieve optimally efficient autonomous locomotion.
The CPG control design problem will be addressed by breaking it down into the following tasks, based on a series of conjectures drawn from biological observations: (a) Find a mathematical model for a neuron, which is simple enough to allow for theoretical analysis but captures essential neuronal dynamics such as spike generation mechanism. (b) Develop a systematic method for designing CPGs that achieve a given frequency/phase profile. (c) Develop an optimization algo-rithm for tuning the synaptic connection parameters of CPGs to achieve the most energy efficient locomotion. (d) Experimentally validate robustness of the design procedure to be developed, in the presence of environmental uncertainty.
The PI has developed a preliminary model for Task (a) by simplifying detailed models from neuroscience within the framework of Lur’e systems which have been extensively studied in robust/nonlinear control literature. Such modeling allows Task (b) to be approached by general-ization of Lyapunov methods in which the PI has expertise and substantial experience. For Task (c), an optimization problem is mathematically formulated and gradient-based dynamic backprop-agation methods will be investigated. For Task (d) and for all other relevant studies, the PI plans to use a specific example of locomotor. The prototype mechanical rectifier (PMR) he proposes is simple enough to allow for extraction of engineering principles by theoretical analysis, simulation, and experiments. At the same time, it captures the essential dynamical mechanism of animal locomotion.
The next technological revolution seems to rely on our understanding of complex biological systems. Such understanding would enable us to develop a completely new kind of robust, adaptive, and autonomous machines. The outcome of this project will enhance the basic understanding of the mechanism underlying such sophistication, through formalization of biological knowledge on animal locomotion in terms of engineering language of feedback control. Our research will have impacts on new innovations in a variety of fields. Realizations of new type of robotic locomotion systems for space explorations would be a direct application. Physiological control of the heart beat profile for stabilization of defective heart may be another. In view of entrainment and self-excitation capabilities of CPGs, the long term implications of the knowledge to be generated may also include advent of drastically different ways for information processing.
Modeling and Analysis of Neuronal Circuits for Locomotion with Sensory Feedback
NIH/NINDS 1 R01 NS46057-01, October 2002 - September 2006, PI: T. Iwasaki, Co-PI: W.O. Friesen (Biology)
The broad aim for this project is to enhance the understanding of biological information processing mechanisms. The immediate goals are to uncover the fundamental roles of sensory feedback mechanisms in the neuronal control of animal locomotion and to establish mathematical models that predict the dynamical behavior of and supply missing information about the biological system. More specifically, the aims are to I) perform biophysical and physiological experiments on leech preparations to collect neuronal and mechanical input/output data needed for quantitative models, II) develop a mathematical model of the neuronal control system for leech swimming that includes sensory feedback, III) predict the effects of sensory feedback through numerical simulations of the model, and IV) test these predictions through physiological experiments on leech preparations.
This project employs the Lur'e model for neuronal dynamics, recently developed by the PI, as a basis for the modeling of neurodynamic feedback control system of leech swimming. The class of Lur'e systems has been extensively studied in the systems and control discipline and thus a variety of mathematical analysis tools are available. The project develops dynamical models (differential equations) of the leech locomotion control system, consisting of the central oscillator, muscle actuation by motoneurons, body-fluid interactions, and sensory feedback from stretch receptors, through parameter identifications based on experimental observations. Physiological experiments will be conducted on dissected and intact leech preparations to obtain explicit values for model parameters and to test hypotheses generated by experiments performed on the model.
The collaborative engineering-neurophyhsiological research proposed here is part of a broad effort to discover general principles for the neuronal control of animal movements. Because of the functional similarity, insights gained from the proposed research on leech swimming can be expected to increase our understanding of the neuronal control of rhythmic movements generally. Potential applications of the knowledge to be generated include insights into the cause of walking disability and development of rehabilitation methodologies, in addition to immeidate applications to feedback control design for rhythmic pattern generation.
 |
 |
Feedback Control Theory for Biological Pattern Generation
NSF/ECS/CAREER 0237708, February 2003 - January 2008, PI: T. Iwasaki
The overall goal of this career proposal is to explore the purely interdisciplinary subject of feedback control system design for generation of rhythmic patterns found in animal locomotion, and to develop effective pedagogical methods for inspiring engineering students with benefits of biological knowledge in the context of systems and control. Our specific goals are to (I) develop an orbital trajectory analysis method for a class of nonlinear systems arising from modeling of biological pattern generators; (II) establish a method for designing a dynamical system that achieves pattern generation with a prescribed oscillation profile; (III) revise the dynamics and control curriculum to provide a broader view of ``systems'' through crossdisciplinary training in neuroscience; (IV) integrate the bio-control research into the science and engineering education at broad levels including K-12 and college undergraduate; (V) broadly disseminate the results of the proposed activities. Our methods and procedures to achieve these goals are to (I) mathematically formulate an oscillation analysis problem and derive a solution using tools from robust control theory, examine the degree of conservatism exploiting the biological knowledge of particular central pattern generator (CPG) architectures; (II) use the analysis result in I as a basis for developing a general theory for the design of CPGs utilizing linear matrix inequality methods, test the applicability of the design conditions against the CPGs known from biology; (III) improve an undergraduate course on systems modeling by introducing neuronal modeling and pattern generation mechanism, develop a new graduate course on robust and nonlinear control for regulation and biological oscillation; (IV) develop research-based educational tools through multidisciplinary, teamworking, senior thesis projects. Use the tools to stimulate K-12 and undergraduate students' intellectual curiosity into engineering and science through a series of outreach/educational activities; (V) utilize conference presentations, publications in archival journals, invited seminars, and possibly tutorial workshops in major international conferences.
The central theme of feedback control theory has been the regulation around an equilibrium point of a dynamical system. In contrast, much less attention has been paid to control specifications involving periodic motion (or oscillation) generation despite their practical importance. The basic research outlined in this proposal will provide an initial stepping stone toward a new control paradigm that focuses on autonomous pattern generation by feedback dynamics. In particular, the project will establish a systematic method for analysis and design of pattern generators through the exploitation of biological knowledge on neuronal oscillators. The crossdisciplinary research activities over biology and control fields are integrated into educational activities at all levels. The revised curriculum will provide undergraduate and graduate students with a broader perspective on engineering problems. The senior thesis project will develop students with team-oriented problem-solving skills in a multidisciplinary environment. The outreach activities will contribute to improve scientific literacy of K-12 students.
Control of Flapping Flight and Swimming
NASA/NIA 3013-UV, January 2003 - , PI: H. Haj-Hariri, Co-PIs: H. Bart-Smith, T. Iwasaki
Morphing: A key emerging technology is in the development of synthetic shape morphing structures and actuators. The Morphing Structures Group at UVA has considerable experience in the design and testing of lightweight shape morphing systems. A major contribution of this group is in the integration of linear actuator devices and materials into statically determinant trusses. Actuation of the active material or device does not generate strain energy within the inactive members of the structure, therefore not diminishing the morphing system’s ability to overcome large restraining forces and moments. A wide choice of actuators is available, including electroactive polymers, shape memory alloys (SMAs), micro-pneumatic devices, as well as magneto and electrostrictive and piezoelectric materials. SMAs and EAPs are of particular interest. Many of these materials can be made in fiber or ribbon form and weaving them facilitates the creation of hierarchical structures containing sensors, power delivery and linear control filaments. We have considerable experience in the use of SMAs. Bart-Smith recently used SMAs to develop a successful shape morphing structural panel. A cantilever beam using a lightweight, near statically determinant cellular metal truss core and Ni-Ti SMA face sheets was used to demonstrate the working principles.
Control: Iwasaki (with NIH/NSF funding) has developed a neuronal controller, which is motivated by considering that a flyer or swimmer can be viewed as a AC-to-DC converter (periodic lateral movements resulting in linear movement), while biological neurons are the opposite (a constant current injection leading to a sequence of electrical pulse firings). With this elegantly insightful (and original) observation, using some similarly insightful models, a neuronal controller was developed and applied to nonlinear oscillators that were tasked with a certain objective. In very few cycles the objective was achieved. This truly-bio-inspired controller is an ideal candidate for the control of flapping or swimming.
Modeling: The development of the control algorithm, as well as the model of the actuator requires a theoretical/computational model of the flyer. Given the complexity of the governing equations and the geometry, it is imperative to have a reduced-order model of the system, allowing for all interactions and control. Furthermore, the model needs to be able to handle all geometries with ease. These requirements point to the direction of an embedding model wherein the solid is embedded in a fluid and the resulting equations are then projected onto an appropriate basis for the reduction of order. Haj-Hariri has been working on these ideas for a few years, the last two funded by NASA.
More details of the current research projects can be found in:
T. Iwasaki, "Neuronal oscillator: A new perspective in control," Seminar Talk, 2002. PPT Presentation
T. Iwasaki and M. Zheng, "The Lur'e model for neuronal dynamics," Proc. IFAC World Congress, 2002. PDF
T. Iwasaki, "Robust self-excitation by biological oscillators," Proc. IFAC World Congress, 2002. PDF
T. Iwasaki and M. Zheng, "What makes biological oscillators achieve robust self-excitation?," Proc. American Control Conference, 2003. PDF
Automotive Independently Controlled Magnetic Valve
2000 Honda Research Initiation Award, January 2001 - December 2001, PI: T. Iwasaki, Co-PI: P. Allaire
The project concerns the development of a set of independently controlled electro-magnetic valves for automotive use as powertrain intake and exhaust use. In normal automotive engine design, the valve timing is dictated by the fixed engine driven camshaft or similar component. The goal of this research is a fully independent valve design which allows for specific timing scheduling and profiling to maximize the performance output of the engine. The valve has to travel 8mm in 3.6ms at the high end of the engine speed envelope (6000rpm). The major challenge for electromagnetic actuator design is to achieve such large acceleration in the presence of uncertain gas dynamic disturbance force. The important control tasks that need to be achieved include soft landing, disturbance attenuation, and energy optimization.
Serpentine Locomotion by Robotic Snake
Grant-in-Aid for COE Research, Ministry of Education, Japan, April 1997 - May 2000, PI: K. Furuta
Most currently available mobile robot mechanisms for ground operations have wheels driven by some type of rotational motion generators such as an engine. Such wheeled mechanisms are relatively efficient, easy to steer, and suited for high-speed driving on a smooth surface. They are, however, not effective in rugged environments such as rough and/or muddy terrains. Mobile robots with legs are being actively researched for several reasons, including the fact that legs provide higher terrain adaptability than wheels. Even higher terrain adaptability may be achieved by multilink articulated robots that "crawl" like snakes. Beyond their adaptability to the environment, serpentine robots offer a variety of advantages over mobile robots with wheels or legs. They are robust to mechanical failure because they are modular and highly redundant. They may also perform as manipulator arms when part of the multilinked body is fixed to a platform. On the other hand, one of the main drawbacks is their poor power efficiency for surface locomotion. Another is the difficulty in analyzing and synthesizing snakelike locomotion mechanisms, which are not as simple as wheeled mechanisms. While the former is a fundamental drawback inherent with the snakelike locomotion, the latter point has been addressed by many researchers, and we hope to add another contribution to overcoming the difficulty.
In this research, we consider a snake robot without wheels that has substantial potential for adapting to the environment at the expense of power efficiency. First, we develop a mathematical model for an articulated snake robot consisting of n rigid links with torque actuators at n-1 joints. Two models for the directional friction force acting on each link are developed and integrated into the total equations of motion for the snake robot. We then show a model transformation that decouples the dynamics into the internal shape motion (joint torques -> joint angles) and the inertial locomotion (joint angles -> inertial position and orientation). This decoupling enables us to concentrate on control of the inertial locomotion through the shape change, assuming that the shape can readily be controlled as desired via the joint actuators. We then analyze the locomotion of the snake robot with serpentine gait from the power efficiency standpoint. In particular, we investigate the shape motion that achieves the locomotion at a prescribed speed while requiring the least input power. Based on the analysis results, we determine the feedback control architecture to realize desired locomotion and propose a method for designing such controllers by suggesting an appropriate input transformation. Finally, our control strategy is experimentally validated by a five-link articulated snake robot. To our knowledge, this is the first research that addresses the problem of modeling, analysis, and feedback synthesis of serpentine locomotion by an articulated robotic snake without wheels.
Integrated Design of Controlled Mechanical Systems
Grant-in-Aid for COE Research, Ministry of Education, Japan, April 1997 - May 2000, PI: K. Furuta
Designs of controlled mechanical systems have been conventionally carried out in two independent steps: the mechanical design followed by the control design. While this strategy has been successful for generating systems that work fairly well, dynamic performance specifications have become increasingly more stringent in some applications and have demanded a new design concept for effectively integrating the two steps. An important aspect of the design is that the mechanical component and the controller are in a feedback interconnection, and as such, we cannot expect that optimization on each will produce a satisfactory result. The design of each needs to take into account the limitations and capabilities of the other. The objective of this research is to uncover the fundamental nature of high quality integrated designs in the context of controlled mechanical systems, and to develop tools for design from this understanding. We focus on identifying the properties of mechanical systems that place limits on controlled performance.
Robust Stability and Performance Analysis of Dynamic Control Systems
Ministry of Education, Japan, April 1996 - March 1999, PI: T. Iwasaki
Performance of dynamic control systems can often be quantified as the size of certain signals within the system in response to a prescribed class of possible exogenous signals. The objective of this research is to develop systematic tools to assess performance of a certain class of dynamic systems. Such tools are based on mathematical models of real systems and thus their applicability is subject to inherent modeling errors. Our approach will explicitly take such uncertainties into account and provide method for calculating robust performance measures, that is, estimates for the worst case performances. The class of systems treated is fairly large, including linear systems with time-varying parameters, uncertain delays, actuator saturations, and general static nonlinearities.
--------------------------------------------------------------------------------
NOTE:Director
teD iwasaki, Professor, UCLA
Current Ph.D Students
Jinxin Zhao (6/2014-present)
Pam Fusek (9/2013-present)
Andy Wu (6/2012-present)
Saba Kohannim(9/2011-present)
Current M.S. Students
Bryan Lee (9/2015-)
Past Post-doctoral Researchers
Xinmin Liu (5/2010-10/2013), UCLA
Yasuyuki Suzuki (10/2012-1/2013), UCLA
Zhiyong Chen (4/2005-8/2006), UVA
Min Zheng (2/2008-8/2008), UVAPast Ph.D Students
Michael Chu (9/2011-6/2012), UCLA
Brady Bolton (9/2009-9/2011), UCLA
Jun Chen (9/2005-5/2011), UVA, "Mechanisms underlying undulatory swimming: From neuromuscular activation to body-fluid interactions," May 2011
Justin T. Blair (8/2003-5/2011), UVA, "Optimal locomotion of mechanical rectifier systems," August 2011
Tom Bliss (9/2005-5/2011), UVA, "Central pattern generator control of a tensegrity based swimmer," September 2011
Yoshiaki Futakata (8/2003-8/2009), UVA, “Natural mode entrainment by CPG-based decentralized feedback controllers," August 2009
Jianghong Tian (8/2003-8/2008), UVA, “Muscle function and neuromuscular transformation in leech swimming," August 2008
Min Zheng (8/2000-8/2007), UVA, “Modeling of CPG-based control mechanisms for leech swimming," August 2007
Dominick Montie, UVA, “Performance limitations and self-sensing magnetic bearings," January 2003
Tsuyoshi Kiyama (4/1998-5/2000), Tokyo Tech, "Robust control synthesis for linear time invariant systems with sector type nonlinearities using circle criterion," March 2001Past M.S. Students
Chin Li (9/2012-3/2014), UCLA, "Neural Control Design of Robust Resonance Entrainment and Experimental Validation with Elastic Flapper"
Ron Forch, (8/2007-8/2009), UVA, “Exploring new paradigms in locomotion: The development and analysis of a simplified manta ray wing model"
Robert Lynch (8/2005-8/2007), UVA, “Modeling the leech swim system: sensory feedback and stability analysis,"
Bo Liu (8/2000-5/2005), UVA, “CPG-based feedback control of prototype mechanical rectifier"
Jeremy Wolf (8/2001-5/2002), UVA
Taro Mori, (4/1995-8/1997) (Co-advised with S. Hara) "Frobenius norm minimization by gradient flow"
Kazunori Yamashiro, (4/1996-3/1998) "Robust control synthesis with adaptive structure"
Goh Shibata, (4/1997-3/1999) "Robust control system analysis with parameter-dependent Lyapunov function"
Hiroki Sugimoto, (4/1997-3/1999) "Control synthesis via IQCs"
Masashi Saito, (4/1998-3/2000) "Control method of a hyper redundant snake robot"
Kazufumi Ichimaru, (4/1998-3/2000) "Stability analysis of linear systems with saturation "
Hirokazu Sugiyama, (4/1998-3/2000) "Synthesis of data-based control systems"
Hirokazu Yamauchi, (4/1999-5/2000)s "Structure/control integration based on finite frequency positive-realness"
Masakazu. Fukaya, (4/1999-5/2000)m "Nonholonomic position and attitude control of an underwater vehicle"
Yoshiaki Futakata, (4/1999-5/2000)s "Branch and bound algorithm for BMI eigenvalue problem on parallel system"Past B.S. Students
Casey Halvordson (9/2008-5/2009) "The perfect dolphin kick"
Patrick Ho (9/2007-5/2008) "Control of an aquatic wing structure using central pattern generators"
Sean Yein (9/2006-5/2007) "Resonance entrainment of muscle-driven pendulum by reciprocal inhibition oscillator"
Devin Mai (9/2006-5/2007) "Resonance control of pendulum systems with recurrent cyclic inhibition oscillator"
Jarett Michaelson (5/2005-4/2006) "Analysis and simulation of a central pattern generator coupled with a prototype mechanical rectifier"
Nathan Hanfman (9/2003-4/2004) "Serpentine locomotion with central pattern generator"
Ayo Olorunsola (9/2003-4/2004) "Analysis of self-excitation attainment in central pattern generators"
John Sklarz (9/2003-4/2004) "Robotic realization of undulatory locomotion"
Daniel Kamerling (9/2002-4/2003) "Analysis of RCI oscillators for leech swimming locomotion"
Hirokazu Sugiyama, (4/1997-3/1998) "Exact computation of the structured singular value"
Hiroyuki Tanaka, (4/1997-3/1998) "On the robust H2 performance analysis"
Kazufumi Ichimaru (4/1997-3/1998) "State feedback control for systems with nonlinear components"
Hirokazu Yamauchi, (4/1998-3/1999) "Locomotion analysis of hyper redundant systems"
Masakazu. Fukaya, (4/1998-3/1999) "Locomotion control of a hyper redundant system: Input transformation approach"
Yoshiaki Futakata, (4/1997-3/1999) "Designing controllers for systems with input saturation"
Rie Nakashima, (4/1999-3/2000) "Analysis of a hyper redundant snake robot: Relationship between driving force and undulation angle"
Fumihiro Shimizu, (4/1999-3/2000) "Integrated design of control/structure systems"
Teruyoshi Sadahiro, (4/1999-3/2000) "Stability analysis of linear systems with time delay"Past Non-thesis Students and Visitors
Aki Saito (6/2014-9/2014), UCLA undergraduate student
Bryan Lee (1/2014-6/2014), UCLA undergraduate student
Min Wen (6/2012-8/2012), visiting CSST undergraduate student from Zhejang University
Tatsuya Ibuki (12/2011), visiting Ph.D student from Tokyo Tech
Chin Li (9/2011-6/2012), UCLA undergraduate student
Saba Kohannim (9/2010-6/2011), UCLA undergraduate student
Michael Chu (9/2010-6/2011), UCLA undergraduate student
Shulin Jiang (9/2010-6/2011), UCLA undergraduate student
Yuko Saito (9/2010-6/2011), UCLA undergraduate student
Toshiyasu Yonemura (4/2002-12/2002), visiting MS student from Tokyo Tech
Sven Hedlund (6/1998-8/1998), visiting Ph.D student from Lund Institute of Technology